

-

- AUTOMOTIVE

-
- AGRICULTURE

-
- PRODUCTION

-
- HEALTH CARE

-
- RETAIL CHECKOUT

-
- SURVEILLANCE

-
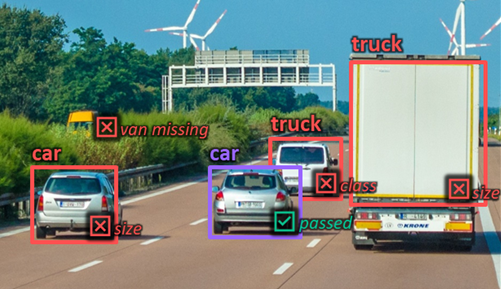
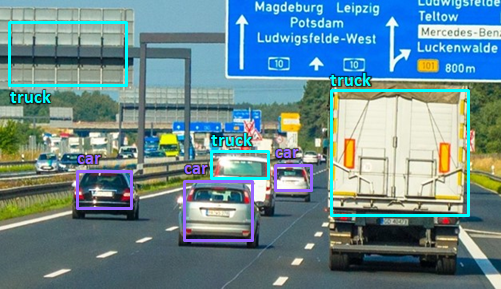
- Input Image

-
- Issue-affected Label
-
- Inference Result
-
- DRONE SEGMENTATION

-
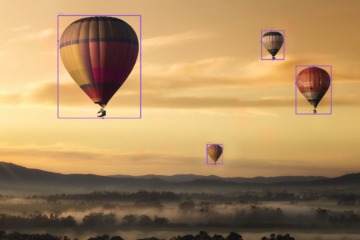
- HOT AIR BALLOON BBOX
-
- HELICOPTER SEGMENTATION
